
linux操作系统线程间的同步方式
Linux操作系统是一种多任务、多用户、支持多线程的操作系统。在多线程编程中,线程间的同步是必不可少的。本文将详细介绍Linux操作系统线程间的同步方式。
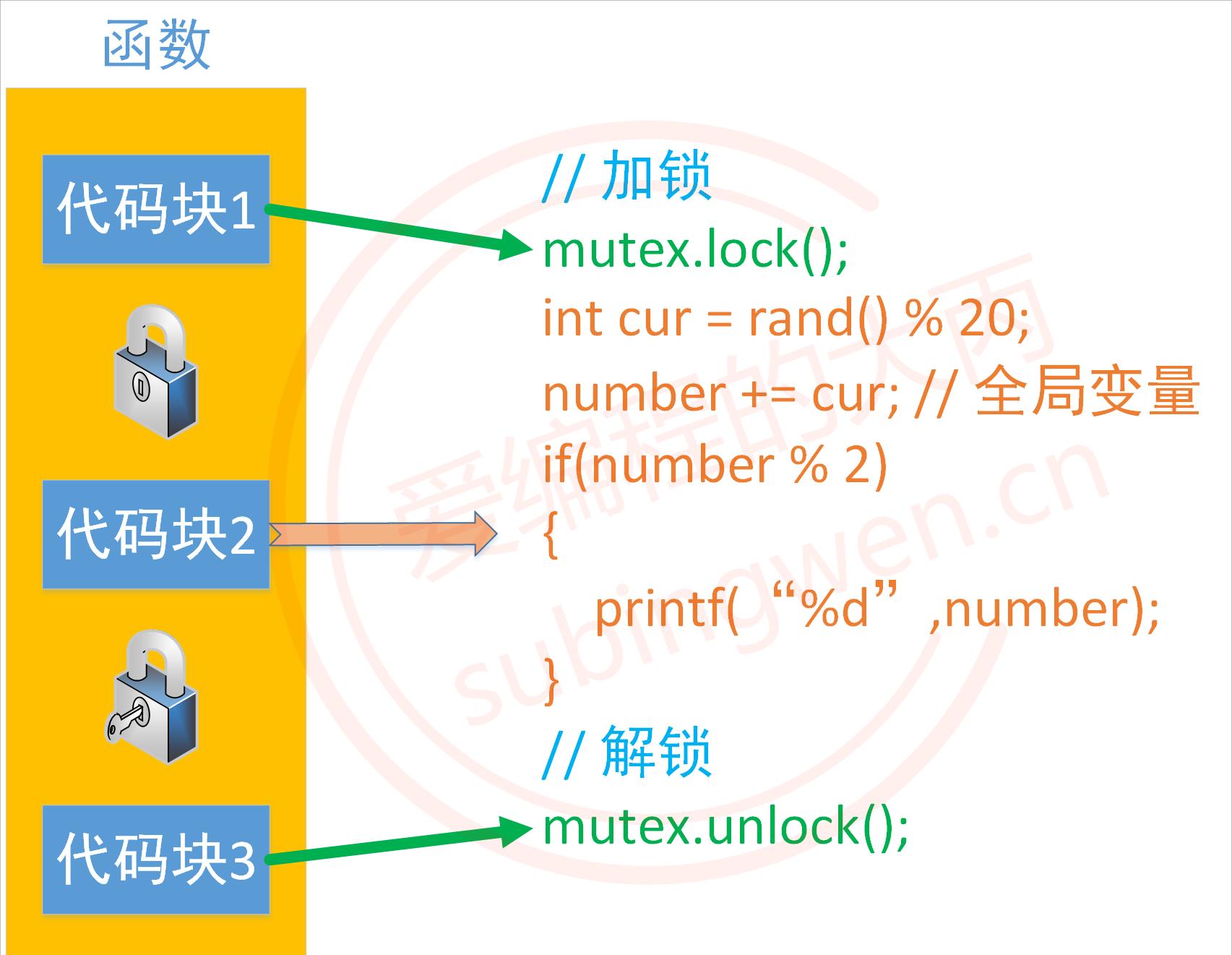
1.互斥锁
互斥锁是一种最常用的线程同步机制,也称为互斥体或者互斥量。在任何时刻,只有一个线程可以获得互斥锁,其他线程必须等待该锁释放后才能继续执行。
在Linux中,使用pthread_mutex_t类型定义一个互斥锁对象,然后使用pthread_mutex_init函数进行初始化。接着使用pthread_mutex_lock函数获取互斥锁,使用pthread_mutex_unlock函数释放互斥锁。
2.条件变量
条件变量是一种用于在线程之间传递信号的同步机制。当一个线程需要等待某个条件发生时,它可以调用pthread_cond_wait函数进入休眠状态,当其它线程满足条件时通过调用pthread_cond_signal函数唤醒等待的线程。
在Linux中,使用pthread_cond_t类型定义一个条件变量对象,然后使用pthread_cond_init函数进行初始化。接着使用pthread_cond_wait函数进入休眠状态等待条件变量发生变化,使用pthread_cond_signal函数唤醒等待的线程。
3.读写锁
读写锁是一种特殊的互斥锁,它允许多个线程同时访问同一个资源,但是对于同一时刻只能有一个线程进行写操作。这种机制可以有效提高系统的并发性能。
在Linux中,使用pthread_rwlock_t类型定义一个读写锁对象,然后使用pthread_rwlock_init函数进行初始化。接着使用pthread_rwlock_rdlock函数获取读锁,使用pthread_rwlock_wrlock函数获取写锁,使用pthread_rwlock_unlock函数释放锁。
4.自旋锁
自旋锁是一种比较轻量级的互斥机制,在竞争不激烈的情况下可以提高系统性能。当一个线程尝试获取自旋锁时,如果该锁已经被其他线程占用,则该线程会一直处于忙等状态,直到该锁被释放为止。
在Linux中,使用pthread_spinlock_t类型定义一个自旋锁对象,然后使用pthread_spin_init函数进行初始化。接着使用pthread_spin_lock函数获取自旋锁,使用pthread_spin_unlock函数释放自旋锁。
以上就是Linux操作系统线程间的同步方式的详细介绍。在实际编程中,需要根据具体情况选择合适的同步机制来保证程序正确性和性能。
imtoken最新版:https://cjge-manuscriptcentral.com/software/2979.html